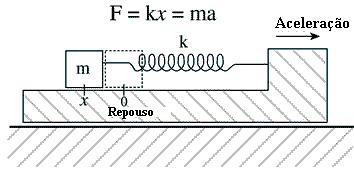
Figura 1: Sistema de massa e usado para medir aceleração
O princípio básico de funcionamento
por trás deste acelerômetro é o sistema de massa e
mola. As molas, enquanto dentro da sua região linear, são
governadas pela lei de Hooke, que diz que o deslocamento da mola é
proporcional à força aplicada, ou seja, F=kx, onde
k
é uma constante inerente à mola.
Outro princípio físico envolvido é a segunda lei de Newton, que relaciona força com massa e aceleração através da equação F=ma. Igualando as duas equações obtém-se ma=kx, e portanto pode-se perceber que uma aceleração a causa um deslocamento da massa de x=(ma)/k, ou, alternativamente, se a massa sofeu um deslocamento x, significa que a massa está sob uma aceleracão de a=(kx)/m. Desta maneira o problema de medir aceleração tornou-se um problema de medir o deslocamento de uma massa. Note que este acelerômetro só mede a aceleração ao longo da mola. Este é, portanto, um acelerômetro de eixo único. Para cada eixo ao longo do qual quer-se medir a aceleração é necessário um sistema como este.
O acelerômetro ADXL150 é um acelerômetro, construído com a tecnologia de micro-máquinas, que consiste de um sistema de massa e mola, bem como de um sistema para medir deslocamento (este sistema é explicado abaixo) e a circuitaria de condicionamento de sinal. O sistema de massa e mola deste dispositivo é mostrado na figura 2.
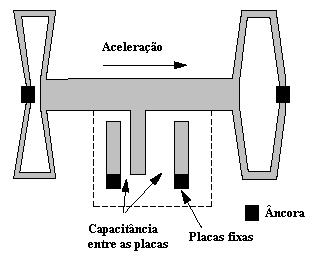
Figura 2: Sistema de massa e mola utilizado no ADXL150
A massa é uma barra de silicone, e a mola
são as ligações flexíveis atadas às
âncoras. O sensor real tem 42 células como as mostradas acima.
Nestas células, o deslocamento da massa é proporcional à
aceleração à qual o sistema está submetido.
As capacitâncias presentes nesta célula
são mostradas na figura 3.
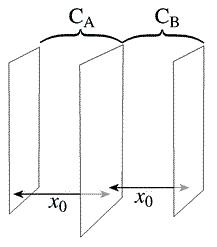
Figura 3: Capacitâncias presentes nas células de massa
e mola do ADXL150
A placa central é ligada à massa, como visto na figura 2. As aoutras são fixas. Quando sob aceleração, a placa central move-se, mudando as capacitâncias, pois a capacitância é inversamentre proporcional à distância entre as placas. O acelerômetro ADXL150 mede a diferença entre as capacitâncias CA e CB. Tal diferença é nula quando não há deslocamento (e portanto não há aceleracão), e quando há um deslocamento x, a diferença entre as capacitâncias é dada por
CA-CB=(-2x)/X02.
O sensor real, como é implementado no circuito
integrado, é mostrado nas figuras 4 e 5.
Figura 3: Capacitores diferenciais e massa (centro) |
Figura 4: Fotografia microscópica dos capacitores e da massa na placa de silício. |
O circuito usado pelo ADXL150 para medir diferença de capacitância é mostrado na próxima página.
