Sensor de microondas "KMY 24"
Índice
Introdução a funcionalidade da família KMY
A família KMY săo sensores de movimento de microondas baseados no efeito Doppler. Um Transistor de alta frequencia é usado como oscilador. Dependendo da frequencia de operaçăo de 9.35 ( KMY 10 ) ou 2.45 ( KMY 24 ) GHz, usando a tecnologia GaAs – FET ou SIEGET ( Siemens grounded emitter transistor). O oscilador produz uma radiaçăo de microondas, o qual é estabilizado por um resonador e é transmitido pela antena.
A radiaçăo transmitida é refletida pelo alvo. O fenômeno Dopler ocorre na radiaçăo refletida, se o alvo está em movimento relativo ao sensor. A radiaçăo refletida é recebida pela antena e misturada com a radiaçăo original usando diodos “Schottky”, resultando em uma tensăo de saída. A frequencia e amplitude do sinal de saída ( o sinal Doppler ) depende do tamanho do local onde o sensor será instalado, sua forma, a distância e a velocidade do objeto alvo.
O KMY 10 tem somente um diodo Schottky, o qual produz a direçăo independentemente do sinal de saída. O KMY 24 possui dois diodos schottky, os quais produzem duas tensőes de saída com uma diferença de fase positiva e outra negativa, dependendo se o alvo esta se aproximando ou se afastando do sensor. Isto é que determina a direçăo do movimento.
O sensor "KMY 24" , fabricado pela Infineon é um sensor de movimentos baseado no efeito Doppler. Ele transmite uma radiação de microondas de baixa energia a 2,45 GHz a qual é refletida por objetos. Se o objeto está em movimento relativo em relação ao sensor, uma transferência Doppler ocorre. A onda de transferência é adicionada a onda original em dois adicionadores, resultando em duas saídas de sinais. A fase de transferência entre estes dois sinais é negativa ou positiva, dependendo se o alvo está se aproximando ou se afastando do detetor.
Principais características:
Pinagem
|
1 |
-Vs (GND) |
|
2 |
Vd1 (saída D1) |
|
3 |
Vd2 (Saída D2) |
|
4 |
+Vs |
Principais características:
|
Parâmetro |
símbolo |
Valores de limite |
Unidade |
|
Temperatura |
Top |
-20...+60 |
C |
|
Tensão |
Vs |
15.6 |
V |
|
Freqüência de operação |
Fo |
2.45 |
GHz |
|
Corrente de operação |
Iop |
23 |
MA |
|
Alcance |
Rop |
5...8 |
M |
|
Amplitude do sinal |
Vd1 |
40 |
MV |
|
Diferença de fase |
40..120 |
Graus |
|
|
Potência de radiação |
EIRP |
8 |
dBm |
O Fabricante:
A "Infineon Tecnologies" foi fundada em primeiro de Abril de 1999, como fabricante exclusiva de componentes desenvolvidos com a tecnologia Siemens.
A Infineon projeta, produz e comercializa semicondutores, sua atividade é então a de promover uma espécie de "aplicação orientada" de seus semicondutores, para serem usados em setores como voz, transmissão de dados, periféricos, comunicação sem fio ( wireless ), setores automotivos e eletrônica industrial, segurança assim como "chip card" e produtos de memórias. O espectro de produtos da companhia cobre ainda as áreas de processadores digital de sinais, microcontroladores, produtos de radio freqüência, semicondutores de potência, DRAM’s assim como semicondutores específicos ( ASICS ).
O efeito Doppler
Quando um observador se movimenta na direção de uma fonte sonora fixa, aproximando-se dela, a freqüência do som ouvido é maior do que quando o observador está em repouso. Se o observador se afasta da fonte, ouvirá um som de freqüência mais baixa do que a ouviria se estivesse em repouso. O resultado é o mesmo quando ela está se aproximando do que quando está se afastando, após passar pelo observador.
Christian Johann Doppler ( 1803-1853), austríaco , num artigo escrito em 1842, chamou a atenção para o fato de que a cor de um corpo luminoso, da mesma forma que de um som, deve alterar-se por cousa do movimento relativo entre o corpo e o observador. É o efeito Doppler, que se verifica para os movimentos ondulatórios em geral.
Aplicações:
Detetor de movimento e posição:
Módulos Doppler são sensores os quais operam em modo de onda contínua. Sua principal função é detectar movimento através de sua sensibilidade sem medir a distância absoluta do objeto.
Considerando a regulamentação atual em Telecomunicações, sensores de movimento podem operar nas bandas de freqüência de 2.45 e 24.125 GHz. Porém os sistemas de 24.125 GHz oferecem um problema técnico adicional, eles são de difícil implementação usando-se a tecnologia de montagem de componentes em superfície ( SMD ) , portanto seu desenvolvimento no futura dependerá de avanços neste "estado da arte".
Por esta razão, a Siemens projetou o KMY 24 ( Módulo Doppler) para operar na faixa de freqüência de 2.45 GHz, o que está completamente de acordo com as normas internacionais relacionadas a este tipo de componente.
Filtros para minimizar a radiação harmônica.
A arquitetura do sensor é fabricada com componentes especiais. Aplaca de circuito impresso é confeccionada em 4 "layers " e montada com componentes SMD em uma de suas faces. A placa possui 4 "layers" porque possui 3 estruturas de filtros que estão acoplados em todos os terminais DC ( terminais de Alimentação ), e a saída RF assim, minimiza a radiação de harmônicas. O novo tipo de antena, com dimensões reduzidas, permite um máximo ganho na operação na freqüência de 2.45 GHz.
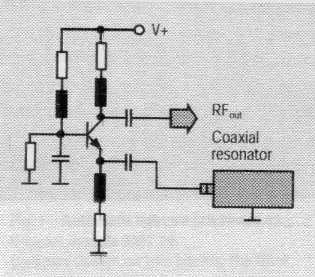
O oscilador que gera a radiaçăo de RF, consiste de um transistor de RF padrăo ( BRF 92P ), com freqüęncia de transiçăo de 5 GHz (Fig.03), um resonador coaxial, capacitores da série 0805 e condutores construídos sob a tecnologia microstrip. A saída do oscilador possui a potęncia na ordem de 10 dBm (Fig.04). A fase do ruído do oscilador pode ser minimizada usando-se um transistor com transiçăo de freqüęncia mínima ( Ft ) . A equaçăo seguinte representa a regra básica para se projetar o oscilador: Ft = 2 x Fo.
Fig.03 - Oscilador
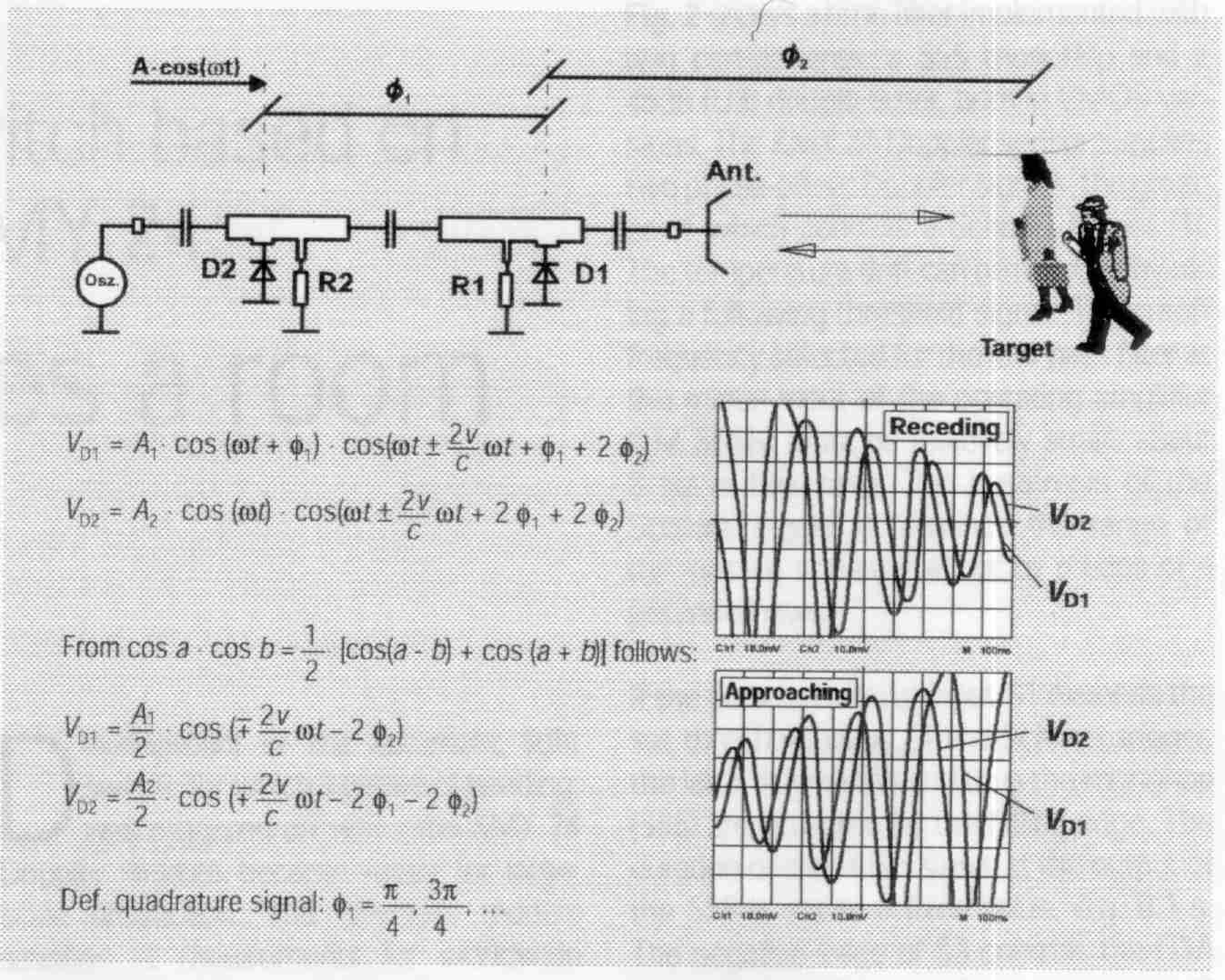
Fig.04 – Circuito completo
Detectando direção com os dois diodos misturadores.
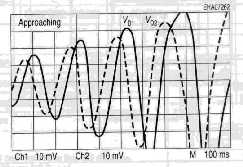
O módulo Doppler KMY 24 detecta não somente a presença de um objeto, mas também a direção em que este se move. Esta informação suplementar é obtida usando-se dois diodos misturadores controlados pelo oscilador de RF, o qual possui a diferença de fase definida. Se a reflexão do sinal é também incluída, o ângulo de fase entre os dois diodos devem ser múltiplos de p /4, para se obter um sinal Doppler com fase ideal de 90 graus. Se esta condição for satisfeita, VD2 será adiantada em relação a VD1, quando um objeto se aproxima do módulo, e se atrasa quando um objeto se afasta do módulo. A amplitude do sinal Doppler VD1 é sempre maior que VD2, desde que o sinal de RF refletido passe pelo diodo D1. (Ver
Fig.05 e Fig.06 )
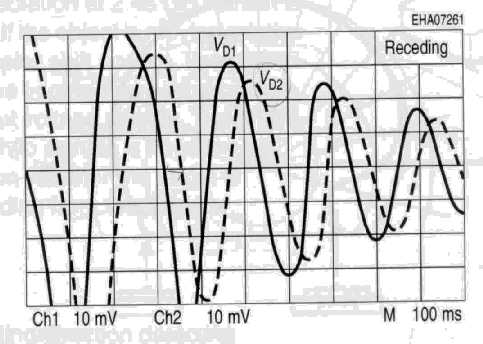
Fig05
9. Referências bibliográficas:
Aluna: Daniele Maia Bianchini 970826-1